状態
|
(経過時刻)
説明
|
[1]
待
機
|
(0.0秒)
荷がボトルの上空で静止している状態です。

|
[2]
振
り
子
運
動
|
ジブを一振り(起伏)すると、荷が振り子運動をします。
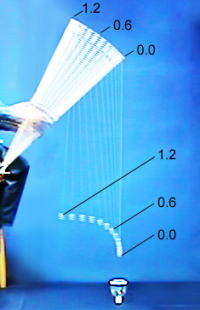 |
(0.0秒〜1.2秒)
ジブを起こします。
荷は手前に振れます。
|
|
|
 |
(1.2秒〜1.8秒)
ジブを伏せます。
慣性により、荷は暫く(ここでは1.5秒まで)手前に振れ、その後 奥に振れます。
(1.8秒〜2.5秒)
ジブ停止後も、慣性により 荷は奥に振れます。
|
|
|
 |
(2.5秒〜3.5秒)
振り子が戻ってきました。
|
このまま放っておくと、長いあいだ 荷は振り子状態が続きます。
|
[3]
振
り
子
の
停
止
|
ジブ操作と巻き上げ(巻き下げ)により、荷をボトル上空で静止させます。
タイミングよく操作すると荷はピタリと静止したままとなります。
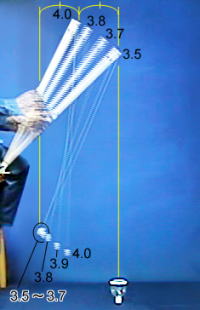 |
(3.5秒)
荷が最も手前に来た時、またはその直前(つまり 荷の振れが停止する直前)に、
(3.5秒〜4.0秒)
振り子(荷)が最も手前にきた位置 と ボトル との中間位置にケーブルの頂点がくるようにジブを起こします。
これにより、荷がボトル側に戻ろうとする力を半減させます。 半減ですから、荷の振幅は半分となり、奥への振れはボトル上空までとなります。
(実際の動作としては 写真でお分かりのとおり、ジブをやや立て過ぎました。従って、荷がボトル上空まで戻ることが難しい状態にあります。)
|
|
|
 |
(4.0秒〜4.3秒)
ここでは、ジブを固定したままで、荷がボトル上空まで戻ってほしいところです。
しかし 先ほどの操作でジブを立て過ぎたため、奥(写真右方向)への戻りが不充分です。(このままでは荷がボトル上空に達しないうちに手前に帰ってきそうです。)
|
|
|
 |
(4.3秒〜5.0秒)
奥方向への慣性力がわずかに残っているうちに、ジブを倒しつつ、やや巻き上げも行います。
感覚的には、ボトル方向へ向かう わずかな力を生かしながらジブを寝かせることにより荷を運び、ボトル上空で慣性力が無くなるように
うまくすり合わせる、というようなところでしょうか。
4.6秒から5.0秒まで、ジブは大きく振っているのに、荷は上下動もなく ほぼ一点に留まっています。(巻き上げ操作との同期がうまくいった例です。)
|
|
|
 |
(5.0秒〜6.1秒)
荷が静止していることを確認してみました。
ピタリと止まったままです。
|
|
[4]
完
了
・
揺
れ
の
静
止
確
認
|
巻き下げにより、荷をボトル内に降ろして課題終了です。
 |
(6.1秒〜7.5秒)
巻き下げます。荷は底に着けず、宙吊りとします。
宙吊りとするのは、荷の揺れが充分に収まっていることを確認するためです。
多少の揺れが残っていても、ボトルが倒れなければ良しとします。
|
|
|
 |
(7.5秒〜8.5秒)
ボトル内で揺れずに静止していることを確認しました。
|
|
